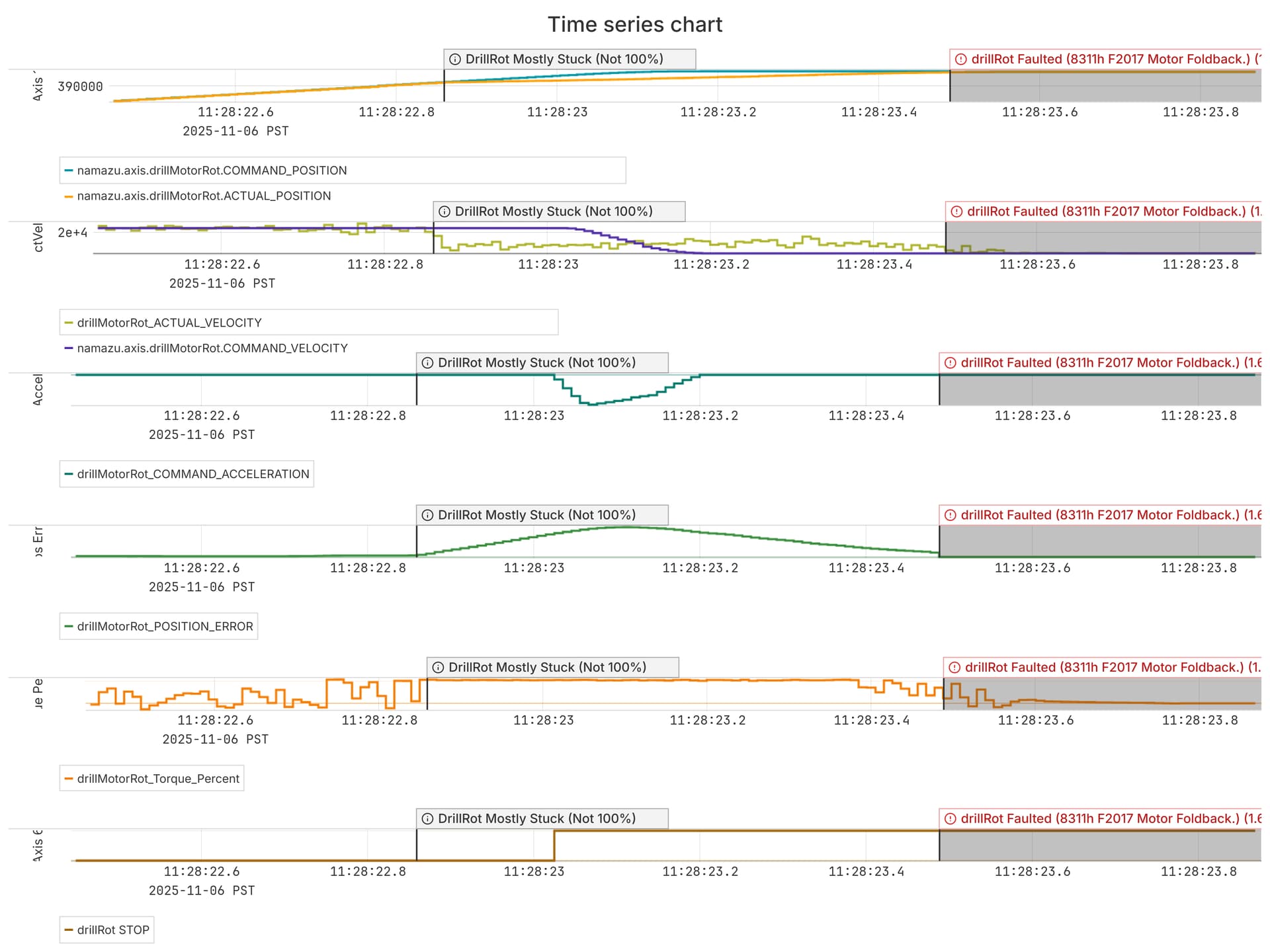
We have an axis where we are commanding a MoveVelocitySCurve() move. Sometimes this axis gets stuck during the move and a large position error builds up. We are okay with this. But when we command another MoveVelocitySCurve() to 0 deg/s and then Stop() the axis, the Commanded Velocity goes to 0 but the Actual Velocity is maintained and the axis keeps moving for about half a second until we get a Motor Foldback fault on the Kollmorgen Drive.
How can I configure this axis to bring the actual velocity to 0 immediately even when there is a large position error? My understanding is that the axis is trying to finish the move and bring the position error under the the position tolerance, even after I send a Stop() command.
Thank you for the detailed description and graphs.
To get the Axis to bring the the actual velocity to 0, you need to get its CommandPosition equal to its ActualPosition. Assuming you do not want the Axis to go into the error state, RSIStateERROR, you could simply command a move to the ActualPosition:
This will immediately on-the-fly modify the currently executing MoveVelocitySCurve(…) with the updated trajectory values, which will cause the CommandPosition to return to the ActualPosition.
If you want this to happen automatically and are ok ending up in the ERROR state, you could set rotAxis->ErrorLimitActionSet(RSIActionE_STOP_CMD_EQ_ACT) (assuming you configure ErrorLimitTriggerValueSet() so that the position error limit would trigger) which would decelerate the in-progress MoveSCurveVelocity() (in the time specified by EStopTimeSet()), transition to the ERROR state and then set the Axis CommandPosition equal to its ActualPosition (automatically in the RMP firmware). With this action, the amplifier will remain enabled so you will only need to ClearFaults(), not AmpEnableSet(true), to recover.
Let us know if either of these solutions will work for you, or if you have other constraints.
I think commanding a position move to the current ActualPosition will work for this case. But it would be even nicer if we could set the ErrorLimit Action to do a full stop and set command position equal to actual position without going to an ERROR state.
Is there a way to configure a callback function to automatically clear the error in this case?
We’re investigating if a STOP_CMD_EQ_ACT action is doable.
We don’t have interrupt callbacks, but if you have a thread waiting for Axis interrupts, you could do something like:
RSIEventType type = rotAxis->InterruptWait(...);
if (type == RSIEventTypeLIMIT_ERROR)
{
rotAxis->MotionDoneWait();
rotAxis->ClearFaults();
}
For safety, we usually recommend using ESTOP_ABORT or ABORT for position error limit. An alternative could be to use a UserLimit that’s set up to monitor the position error with a tighter limit value (smaller than rotAxis->ErrorLimitTriggerValueGet()) using RSIUserLimitLogicABS_GT, then use that (MotionController) interrupt to to notify your software to do the MoveSCurve() to the ActualPosition. This way you’d avoid all ERROR states.
No new feature update: we are not moving forward with STOP_CMD_EQ_ACT.
What we confirmed is:
E_STOP_CMD_EQ_ACT does not provide a distinct, reliable behavior we can recommend for drives in position-mode.
In our tests, its externally observable behavior overlapped heavily with E_STOP_ABORT (including ending in error flow), and we also observed undesirable command-position behavior.
A non-error STOP_CMD_EQ_ACT also lacks a clean fit in the current firmware’s Axis state machine (STOPPING/STOPPED/IDLE/ERROR). Forcing CMD=ACT while enabled is transitional behavior, not a stable operating state, and that creates ambiguity around motion completion and acceptance of subsequent commands.
Given that, we do not currently have a supported “full stop + cmd=act without ERROR” action.
Assuming you’re having the issue, can you share how you’re handling it now, and what are the biggest pain points with your current handling?
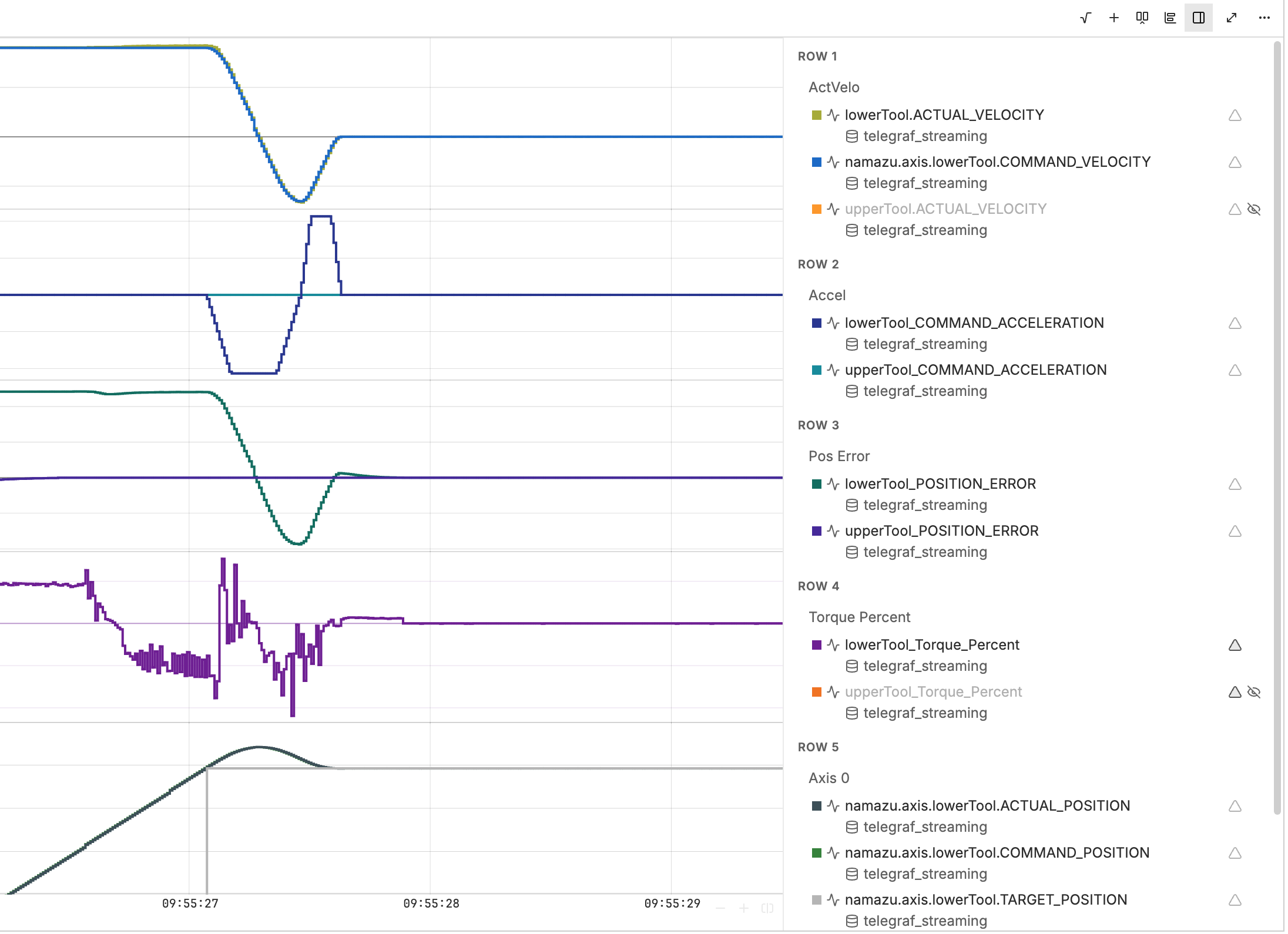
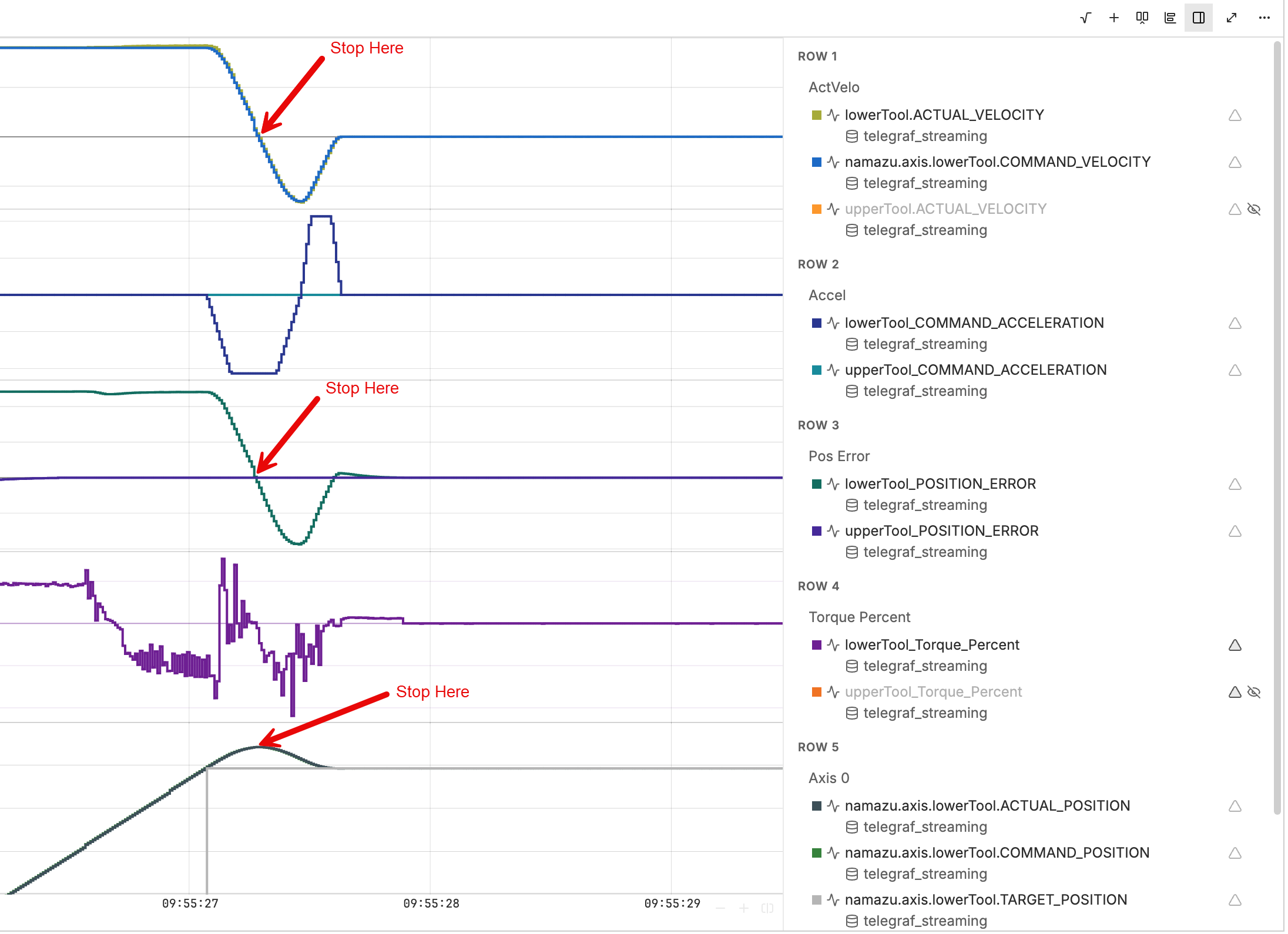
The only issue I find with this method is that the tool needs to correct for “overshooting” the “actualPosition” by reversing its movement which makes this tool lowerTool look as though it’s starting up again after finishing its movements.
This is confirmed in the below plots. I recently discovered the RSIActionTRIGGERED_MODIFY in the RSI documentation that seems like a potentially better fix. Just wanted to double check why this wasn’t originally suggested as a fix in this thread. Is there something that I’m overlooking in the documentation?
TriggeredModify() acts on the commanded trajectory, so for the use case in this thread I would expect it to have the same fundamental limitation as Stop(). It will decelerate the commanded motion to zero using the configured Triggered Modify decel/jerk profile, but it does not set
CommandPosition = ActualPosition. If a large position error already exists, the axis can still end with CommandPosition ahead of ActualPosition, and in a position-mode drive that can mean continued torque output as the drive tries to pull Actual back to Command.
TriggeredModify() still works on the commanded trajectory, so it would not address the core issue here, which is the remaining CommandPosition - ActualPosition error.
One thing worth trying is the existing MoveSCurve(actualPosition, ...) workaround, but with significantly faster trajectory parameters than a normal motion. If the axis is truly stuck and ActualVelocity is already near zero when you detect the condition, then using much higher velocity / accel / decel / jerk values for that move should collapse the command position onto the current actual position much more quickly, which should reduce the servo torque trying to pull the axis forward.
The main caution is to avoid making it effectively instantaneous if the axis may still be drifting when the command is issued, since that could create a sharp correction in the opposite direction. But if this is a genuine stuck-at-rest condition, then faster move-to-actual trajectory values seem like a reasonable thing to test.
I would be cautious about calling MoveSCurve(ActualPositionGet(), ...) in a fast loop, because that repeatedly retargets a non-blocking point-to-point move to a changing feedback value. That can make the behavior timing-sensitive and potentially unstable or oscillatory.
A cleaner approach may be to use TriggeredModify() with a high TriggeredModifyDecelerationSet() value so the axis reaches zero velocity and transitions to IDLE quickly, then wait for motion complete and call AmpEnableSet(false). If the axis is configured with the amp-disable Cmd=Act behavior, that seems like a better fit than Stop(), since Stop() ends in STOPPED and the documented Cmd=Act caveat applies in MOVING / STOPPING / STOPPED states.
So TriggeredModify() -> waitUntilMotionComplete() -> AmpEnableSet(false) seems like a reasonable thing to test.