In order to use PT motion, do I have to call this function repeatedly, in a loop perhaps?
axis.MovePT(RSIMotionType.RSIMotionTypePT, first, time1, points, emptyCount, false, false);
For a 2 axis system, Axis X and Axis Y which one will applly?
Option 1
axisX.MovePT(RSIMotionType.RSIMotionTypePT, firstX, time1, points, emptyCount, false, false);
axisY.MovePT(RSIMotionType.RSIMotionTypePT, firstY, time1, points, emptyCount, false, false);
Or Option 2: I am combining the positions
// Create a combined positions array
std::vector positions;
for (int i = 0; i < TOTAL_POINTS; ++i) {
positions.push_back(positionsX[i]); // Axis X position
std::cout << "Positions X: " << positionsX[i] << std::endl;
positions.push_back(positionsY[i]); // Axis Y position
std::cout << "Positions Y: " << positionsY[i] << std::endl;
}
for (int i = 0; i < TOTAL_POINTS; ++i) {
multiAxis->MovePT(
RSIMotionType::RSIMotionTypeBSPLINE, // Motion type
&positions[i], // Pointer to the first element of combined positions
×[i], // Pointer to the first element of times
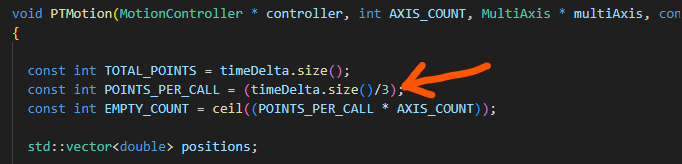
TOTAL_POINTS, // Number of time slices (common for both axes)
EMPTY_CT, // E-stop empty count threshold
false, // Whether points are kept or not
true // Specify if this is the last MovePT
);
}