Based on the (good) documentation on master-based homing, I need to double-check my understanding.
Regarding the limit switch illustrated in the diagrams, is that only the drive-level input (i.e. the PosLimit or NegLimit attribute of a DigitalInput element) that must be wired into the drive? Is there no other way to have a “limit switch” WRT homing? (E.g. I can’t use an arbitrary EtherCAT I/O as the limit, right?)
We do not currently support that for positive/negative limits. We do support arbitrary input address for the home limit:
HomeLimitCustomConfigSet()
ExampleCode
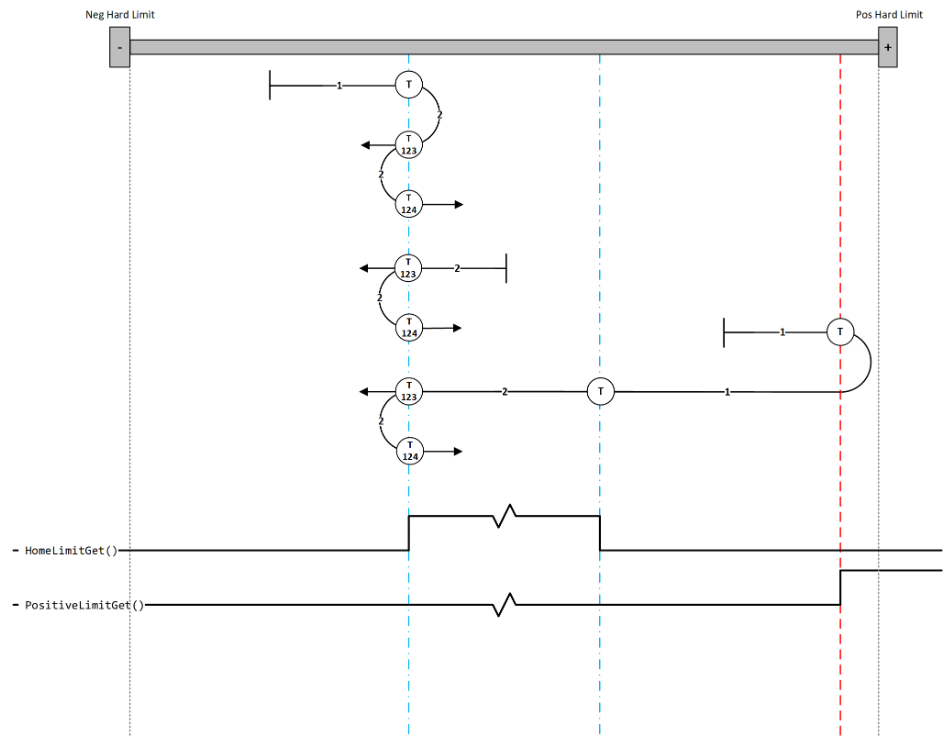
So you could use one of these homing methods with with an EtherCAT IO:
(103) PositiveHome LeftIndex
(104) PositiveHome RightIndex
(105) NegativeHome RightIndex
(106) NegativeHome LeftIndex
If you wanted to do one of the more complex behaviors now you could achieve it by calling axis.Home() multiple times while changing the home limit to your desired positive/negative/home network address.
1 Like
Thanks, @nikolas. I’m asking just to make sure that I know what options are available to us.
We’re using the custom home limit. I just needed to be able to predict how the way we’re doing limits (using arbitrary EtherCAT I/O points) would affect the master-based homing routines we want to use.
They should all behave the same only with the specified address acting as the home limit. You might experience some additional latency associated with EtherCAT communication.