Is there a bit/word in the firmware that I could monitor that would reflect the “enabled” state of a motor?
I can get the AMP_FAULT I/O address, but that’s only going to be high if the drive reports a fault, right? If RMP faults (for whatever its reasons), is that reflected anywhere?
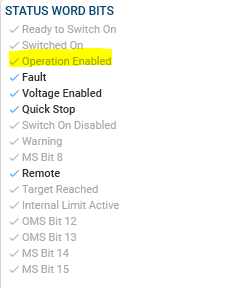
We use the “Operation Enabled” bit of the status word to determine the enabled/disabled state of a given axis. Depending on what you need, you might also observe:
0 Ready to switch on
1 Switched on
2 Operation enabled
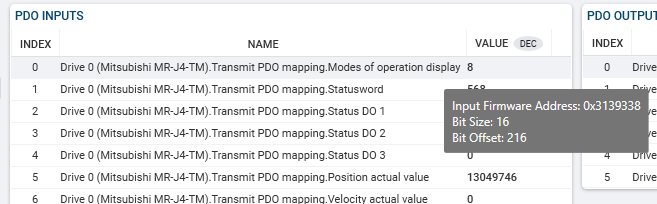
Only the drive sets this PDO.
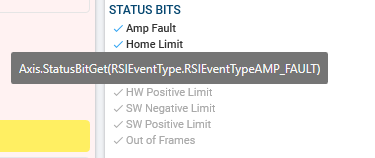
StatusBitGet() will get you if an object has a fault in the RMP.
The RMP can set this high. but it will also reflect the value in the status word.
SourceNameGet() Is also useful for debigging any exceptions/faults in the RMP.
Also
You can also configure RMP objects to log or throw exceptions. ThrowExceptions(bool) Then either catch them or check the size of your error log.
I haven’t tried anything because it’s difficult to know for sure if the memory at an address is what I’m really looking for, especially if it’s only a bit. I was looking for an authoritative answer.
Does that address (RSIAxisAddressTypeSTATUS) correspond to the “status bits” shown in RapidSetup? And which bit is the fault bit?