I’m noticing some difference in enabling behavior and I don’t know what the root cause is. In the below videos, I am just enabling and disabling a couple vertical linear axes. When I do it using Kollmorgen Workbench there is a quiet click of the brake disengaging and the axis drops slightly before torque is applied. However, when I engage the axes in RapidSetupX or with RMP api, There is a louder 'kerchunk" noise.
Kollmorgen Workbench:
RMP:
Another thing that is even more concerning, when I enable one of the axes at our home position, ~1mm away from an end stop, We get some loud and visible oscillations as the axes bangs against the end stop for about a second before it settles. Again, this behavior does not occur when enabling the axis with Workbench.
Can anyone explain what could be causing this behavior difference? Is RMP not using the drive’s tuning parameters or setting a different brake release delay?
When the AKD drive is in CSP mode, the tuning is completely controlled at the drive level. RMP is not changing any control gains… It is just sending the command position.
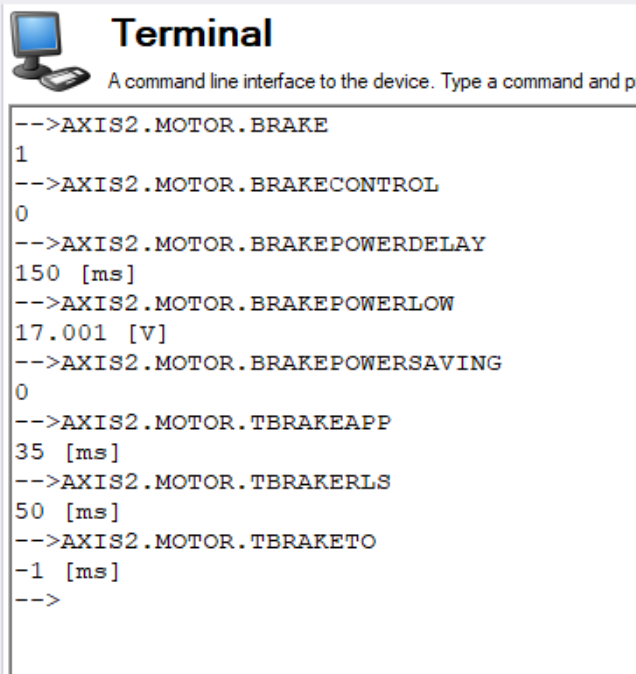
In Workbench, can you tell me what your AXIS#.MOTOR.TBRAKEAPP and AXIS#.MOTOR.TBRAKERLS settings are set to? For a vertical application with holding brakes, these time delay settings prevent the load from falling upon enable as the torque transitions from the brake to the motor and vise versa. RMP does not control or change Brake apply or release delay settings as this must be managed at the drive level, but I’m curious what you have them set to.
When you get in give me a call, I have a test that I’d like you to run to see if it changes behavior.
Upon further investigation I think we understand what is going on. Your Brake Release delay is set to 50 ms. This means that when the RMP EtherCAT master sends the Enable command via the controlword, the AKD drive will activate the motor, but then it has to wait for the 50ms timeout to elapse before it tells the EtherCAT master that it is enabled via the Operation Enabled bit. So there is a period of time that the motor is enabled, but the EtherCAT master is not in control. In the case of a vertical application with a brake, it is imperative that the motor is tuned with current/torque offset so that it won’t fall during the transition. If this offset isn’t set correctly, then the load will fall and will be falling during the enable transition which could cause some overshooting and undesirable effects.
The reason for the difference in enable behavior between the RMP EtherCAT master and the Workbench software is that I suspect Workbench knows when the motor is actually enabled and doesn’t have to wait the extra 50ms to activate the position loop. Enabling the position loop via EtherCAT master just takes longer due to the extra brake release delay timer in this case which is why it moved farther/was louder or hit the end stop.
I suggest that you switch the control mode to torque in workbench and then manually adjust the IL.OFFSET parameter (negative or positive, depending on direction) so that the axis floats without wanting to move up or down. Ideally, it has the same resistance to movement in both directions. Once you have that done, you’ll be able to use the workbench autotuner to finish tuning.