So, should I decide to forgo using all the canned and tested homing methods available in RMP, I need to answer a few questions that will inform the decisions I make when designing a solution.
Is there any benefit to switching the drive to homing mode, if I’m just going to manually command moves corresponding to what Home() does for the various stages?
Am I just going to use user limits to estop the motors when the input does what I want it to do?
Are there things RMP is doing (correctly) that I need to do by hand?
Our recommendation is to use drive based homing whenever possible as it is more accurate. What specifically you need to do in order to set that up will depend on your drive. Check your drive manual. There is no reason to switch to homing mode for a custom master based homing routine.
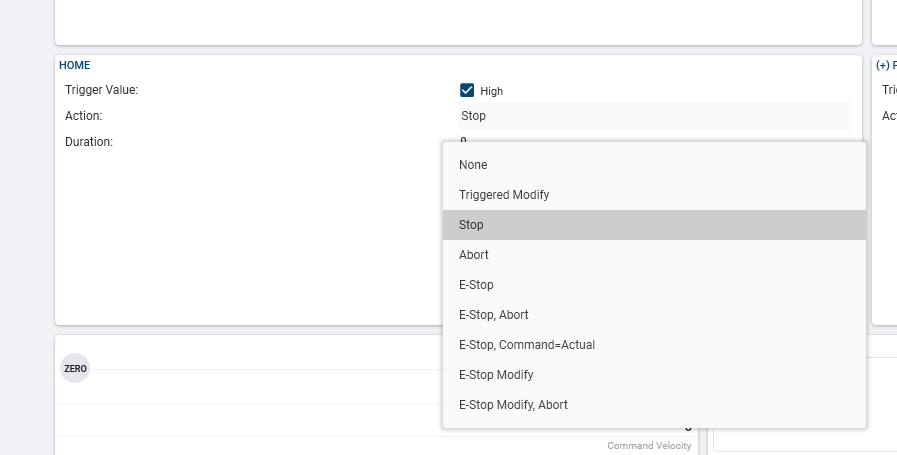
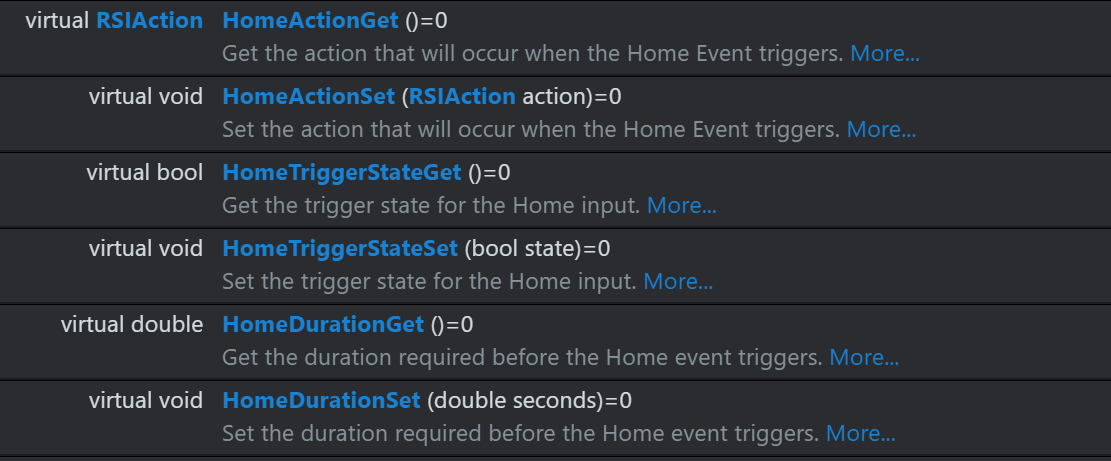
You could still use the home limit. No need to use a user limit. You can set the stop behavior to whatever your preference is.
You can still use HomeOffsetSet() and just call home() with the current position method after your custom homing has the axis where you want it relative to the home switch.